SciML Ecosystem
TAMIDS Workshop
10/25/22
Scientific Machine Learning1
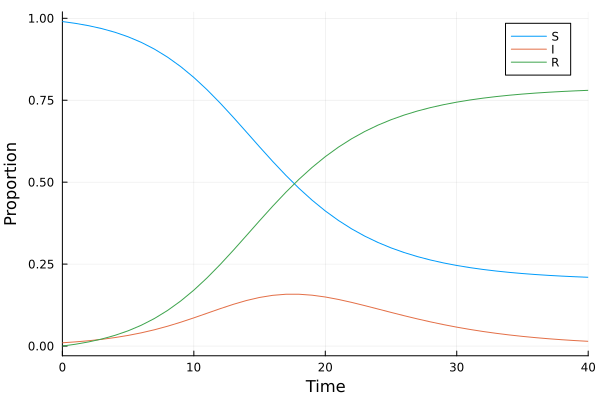
\[\begin{equation} u(t) = \begin{bmatrix} S(t)\\ I(t)\\ R(t) \end{bmatrix} \end{equation}\]
\[\frac{du}{dt} = NN(u, p, t)\]
\[\frac{du}{dt} = f(u, p, t)\]
SciML Software
- An Open Source Software for Scientific Machine Learning 1
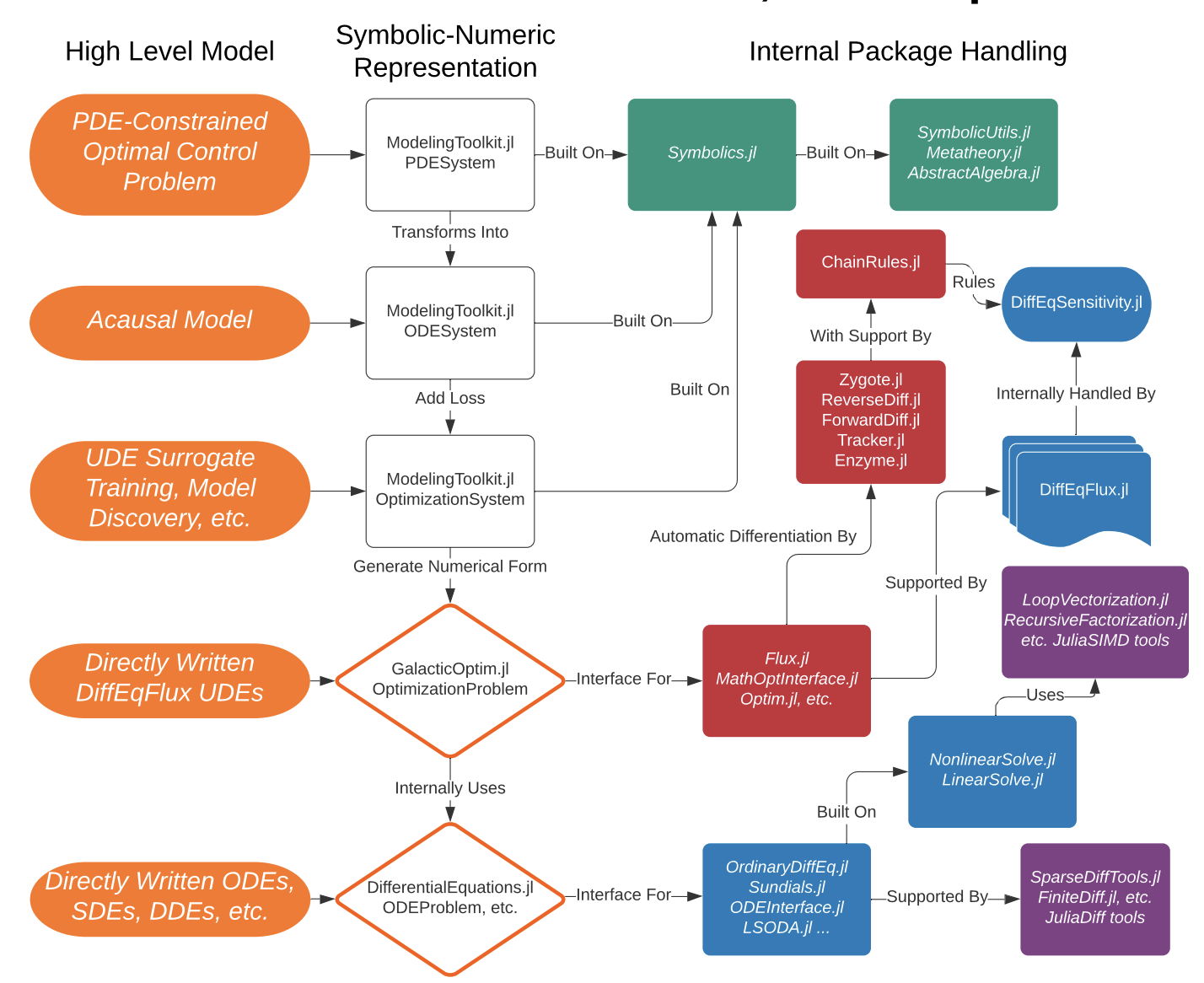
- Leverage the type inference and multiple dispatche of Julia to integrate packages.
- This ecosystem supports
- Differential Equation Solving
- Physics-informed model discovery
- Parameter Estimation and Bayesian Analysis
- And many others (134 packages in total)
SciML Software1
Model Discovery and why we need it?
- Suppose the UDE1 model is successfully fitted with dataset \(\{u(t), t\}\)
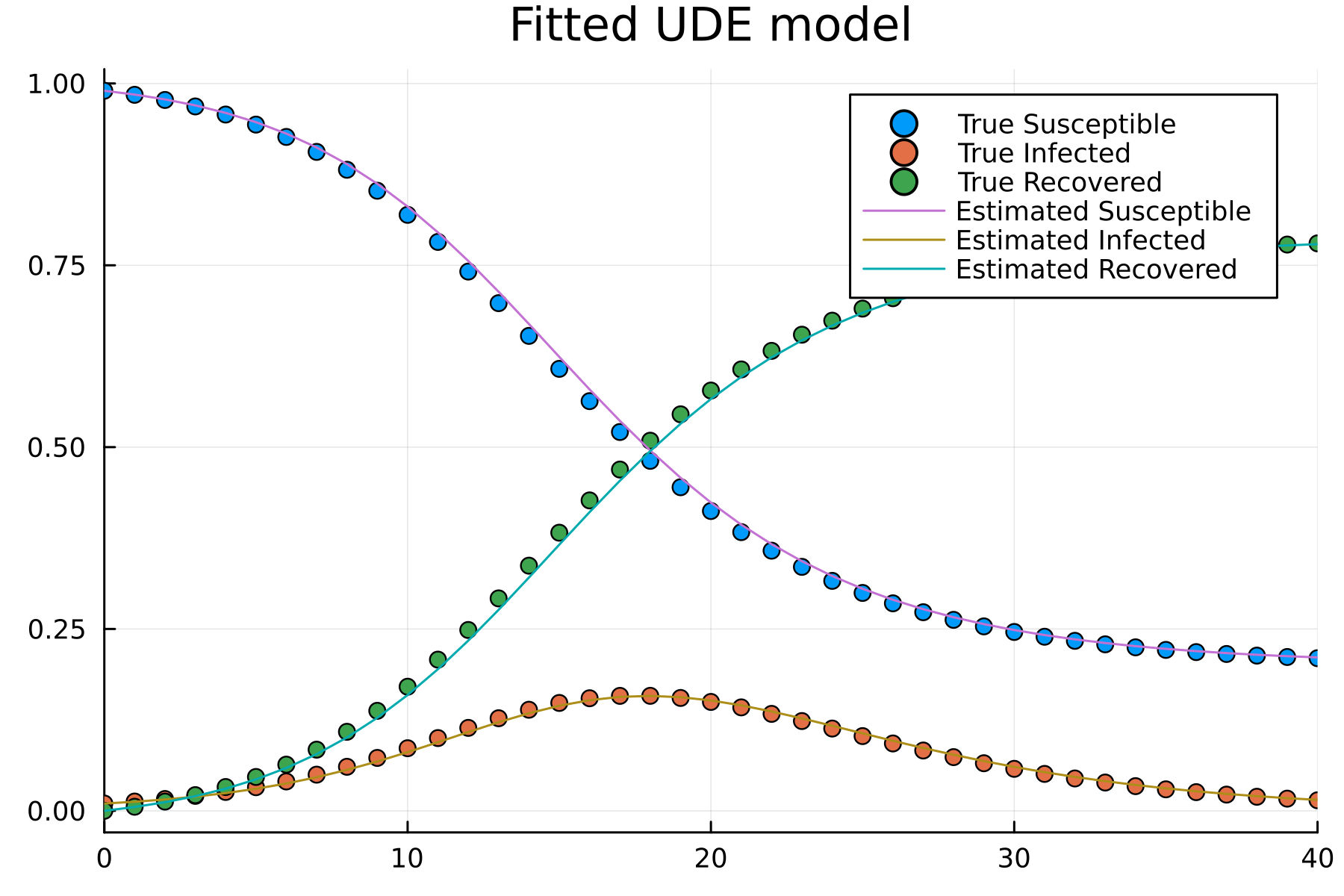
\[\begin{align} \frac{dS}{dt} &= -\lambda_{NN}(I(t), \beta, \gamma) S(t)\\ \frac{dI}{dt} &= \lambda_{NN}(I(t), \beta, \gamma) S(t)-\gamma I(t)\\ \frac{dR}{dt} &= \lambda_{NN}(I(t), \beta, \gamma)S(t) \end{align}\]
- How is the extrapolation?
- Such as \(u_{ext}(t_{ext}) \notin \{u(t), t\}\)
Model Discovery and why we need it?
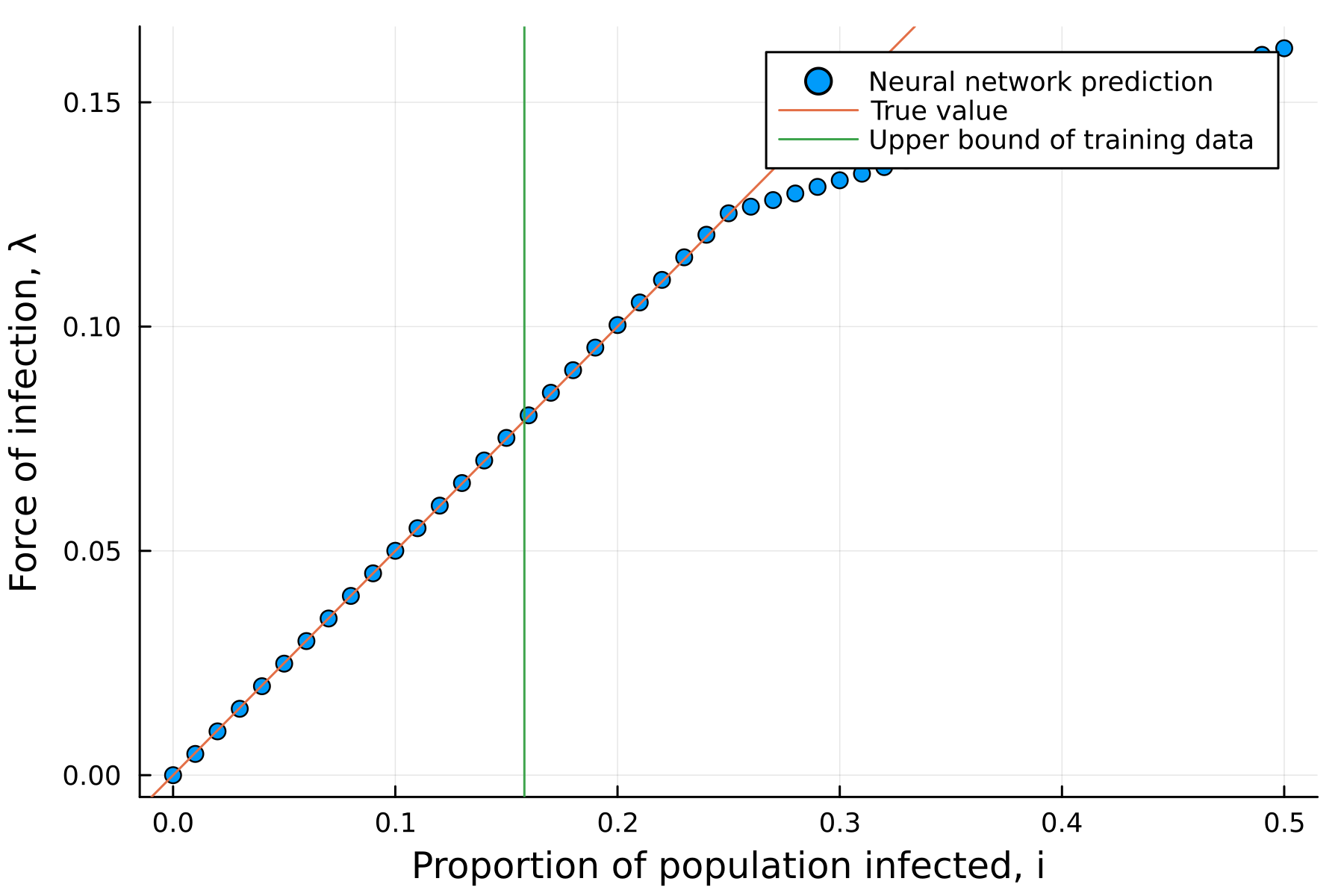
- We should get
\[\lambda_{NN}(I, \beta, \gamma) \approx \beta I\]
- However, the extrapolation of nerual network is errornous.
- Sparsification of neural networks is needed (Occam’s razor).
- Symbolic regressions1
- DataDrivenDiffEq.jl